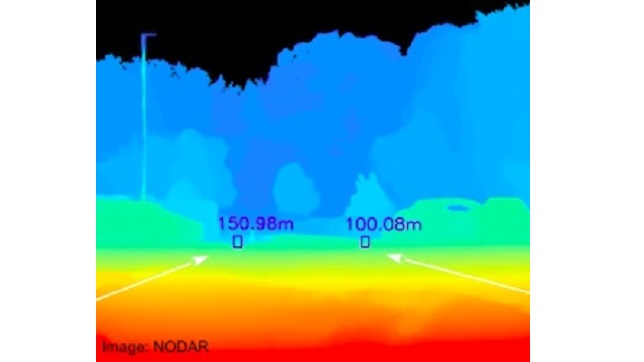
NODAR, Inc. released its Hammerhead™ 3D vision platform for autonomous driving. NODAR Hammerhead™ produces high-density 3D point-clouds at ranges up to 1,000m with accuracy. This includes small object detection at long ranges.
Beyond small object detection, NODAR Hammerhead™ delivers a new level of safety where existing solutions fall through. Mono-camera solutions counting on deep learning to estimate depth are inherently limited by finite training sets, compute requirements, and known object ambiguity, exposing life-threatening uncertainty. The LiDAR scanning process takes precious time, whereas a camera-based system offers >20X the area coverage rate with the reliability, robustness, and low price of high volume solid-state cameras. NODAR produces frame-by-frame disparity maps every 33 milliseconds while single-camera systems and LiDAR must aggregate and analyze data before producing results, causing significantly slower performance.
NODAR Hammerhead™ uses data from multiple cameras to calculate real physical measurements of distance to targets. The unique advantage of NODAR’s system is the ability to mount the cameras independently in long-baseline configurations, like within the side view mirrors, headlamps, or on the roof. With highly accurate long-range 3D sensing and no reliance upon inferred measurements, Hammerhead™ accurately captures instances of banked roads, disabled vehicles, and road debris – edge cases that other vision systems will miss.



