
Connected vs. Autonomous vehicles
Autonomous vehicles are an emergent technology. It seems like there is a more exciting innovation always just waiting to happen. Autonomous cars can control themselves, sense their surroundings, detect pedestrians, park, change lanes, merge safely onto highways, and more. It is no news that autonomous fleets will certainly reduce the risk of road fatalities and enhance traffic flow. After all, 94% of automotive collisions happen because of human error. Hence, this application of automotive technology is forever going to change the way we travel. With the help of sensors, onboard cameras, and lidars; self-driven cars can make their own decisions without very little or almost no human interaction.
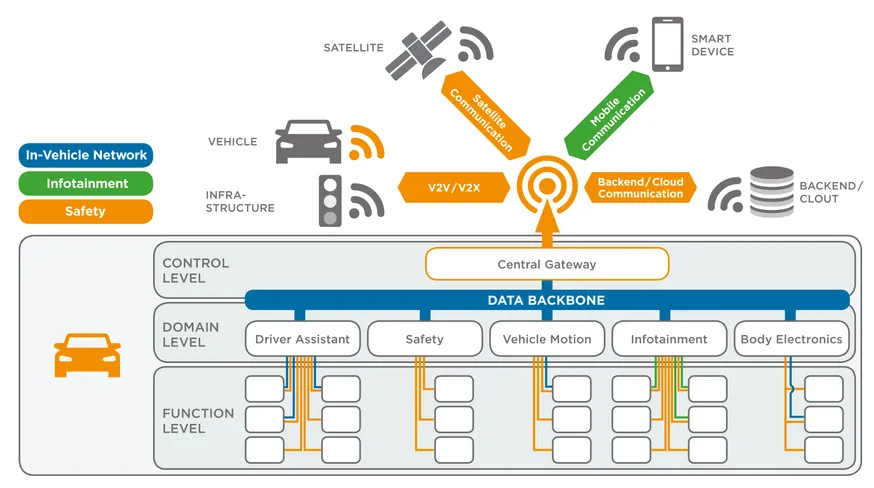
On the other hand, while connected vehicles cannot make their own decisions, but they still have the potential to transform travel. At its core, connected vehicles form a networked environment that sustains high-speed data transactions among vehicles (V2V), infrastructure (V2I), or other devices (V2D). This ability to identify, collect, process and exchange real-time data equips drivers with greater situational awareness. For instance, in case of a vehicle breakdown, a notice gets transmitted to the surrounding vehicles, so drivers can press on the brake pedal and avoid collisions.
Why must autonomous vehicles connect?
As mentioned earlier, autonomous vehicles deploy intelligent algorithms that enable the vehicle to make its own decision. However, autonomous vehicles will not get much smarter unless they’re connected. Imagine a foggy morning. Your car drives itself only to face poor visibility and despicable sensor ranges. Here, V2V connectivity becomes more than just a channel for information relay, it becomes essential for on-road safety.
For autonomous vehicles to function on actual roads, they must operate safely under any and every condition. For that to happen, these driverless cars must exchange information with other vehicles and roadside infrastructure. V2X communications capture and interpret pragmatic data that further help driverless cars to better execute actions like accelerating or braking.
Connectivity acts as an additional sensor, letting your car see further, even when the driving conditions are poor. Connectivity provides out-of-sight information to the radars and sensors, advertently helping the car navigate better. So, even on a foggy day, your driverless car will aptly stop by at the intersection. With vehicle-to-infrastructure (V2I) communication, your vehicle will rightly know when to stop, despite poor visibility.
Autonomous vehicles may intelligently combine vehicular data from multiple sensors but it won’t be enough if they aren’t using it strategically. Even with safety tools like advanced driver assist systems (ADAS), there is only so much that can be done without connectivity. The failed self-driving tests of Tesla and Uber are a testament to this. Road incidents that seem pretty straightforward to humans may confuse automated vehicles. Connecting autonomous vehicles gives them a geo-localized context. Mapping surroundings is crucial, at least from a safety perspective. Knowing where a pedestrian is crossing, or an upcoming area with bad weather will help the vehicle slow down in good time.
Building a connected infrastructure and promoting data-driven mobility is the key to fewer driving errors. With it, even self-driven cars will make split-second decisions. Connected automated vehicles (CAVs) will perceive things that sensors alone cannot. For instance, if a connected vehicle were to identify twenty cars braking at the same place, it might use that information to slow down and prepare for braking too. With V2X connectivity, autonomous vehicles will anticipate traffic changes better and plan ahead.
Concluding Remarks
Autonomous driving is an audacious yet distant goal. While the future of self-driven cars is still unknown, here is one thing that we know: we must master connectivity and V2X communications to deliver self-driven cars. These communications will depend on both sensor technology and radio-based communication. Car sensors will help systems interact with immediate surroundings whereas radio-based communication will enable data exchange with traffic infrastructures like lights, signs, and tolls. CAVs have the potential to adapt to real-world traffic conditions and instill the hope for widespread consumer adoption. For this to happen, technologies like 5G and multi-access edge computing need to be leveraged—so we can finally fill our roads with self-driven cars.
References:
https://www.ite.org/technical-resources/topics/connected-automated-vehicles/
https://ieeexplore.ieee.org/document/8451989
Image credits: https://spectrum.ieee.org/6-key-connectivity-requirements-of-autonomous-driving
Author:

Tushar Bhagat
Director
Uffizio India Pvt. Ltd.
Mr. Tushar Bhagat is the CEO of Uffizio. He has simmered 15 years worth of informatics knowledge & experience into a one-of-a-kind telematics platform. This fleet management system has been acclaimed and widely used by businesses in over 60 countries. Mr. Bhagat firmly believes in finding creative solutions to everyday challenges—so businesses can bloom into their full potential.
Published in Telematics Wire

