High (L4) and Full (L5) autonomous features aim to transfer the entire responsibility of driving from humans to vehicles. Fully Autonomous Vehicles (AVs) are expected to react appropriately safely to the complicated and extremely diverse driving situations that it has to encounter on road , be it driving at intersections, tackling vulnerable road users (VRUs) such as motorcycles, bicycles, pedestrians, animals and what not. Autonomous vehicles equipped with only in-vehicle perception suffer with limited range and line of sight constraints. This leaves the AVs to sacrifice with un-addressed features of (L4 – L5) level of autonomy.
On a parallel track, V2X (vehicle-to-everything) technology improves road-traffic safety, fuel efficiency and driving comfort by connecting transportation infrastructure to vehicles and vice versa. This makes the V2X system a lot cooperative in nature, and thus Tata Elxsi believes V2X and autonomous vehicles could complement each other.
Marrying the V2X features with AVs can enhance two key features of autonomous driving: Sensing and Maneuvering. Cooperative Sensing allows vehicles to exchange information gathered from local sensors, and Cooperative Maneuvering permits inter-vehicle coordination of maneuvers. It enables the creation of cooperative AVs, which may significantly improve traffic safety, efficiency, and driver comfort along with improved decision making in maneuvering complex driving scenarios such as intersection & handling VRUs. V2X communication provides 360-degree non-line-of-sight (NLOS) awareness and increases the capabilities of the existing line of sight sensors viz. Camera, LIDAR, and RADAR in AV perception system, thus extending the AV’s ability.
Easier said than done, this is an expensive solution to try out as the implementation and testing would require infrastructure refinements, addition of new sensors and other hardware that makes these features viable for testing the Connected AVs (CAV).
This whitepaper talks about the necessity of CAVs, aligned to Intelligent Transport Systems for communicating with roadside Infrastructures and Non-Line of Sight (NLOS) neighboring vehicles. End result being, coordinated driving decisions (eg. Cooperative Adaptive Cruise Control for Green Light Optimized Speed Advisory – GLOSA), for improved safety, expediency, and L4-L5 level of mobility. To tackle the implementation part is Tata Elxsi’s modular Autonomous Driving (AD) software Autonomai & cost- effective V2X Emulator based solutions for CAVs ecosystem are detailed along with use cases.
Technology Introduction:
AUTONOMAI – Tata Elxsi’s Autonomous Vehicle end-to-end software platform, autonomai, is designed to help OEMs and Tier1s to build, test and deploy Autonomous Driving applications rapidly. The multi-model sensor-based perception system perceives the environment surrounding the vehicle and builds a detailed environment map. Both, on-road objects such as vehicles, pedestrians and road infrastructure details such as lane markings, traffic signs, and signals are detected and classified. The GNC system extracts the drivable region and performs localization, path & motion planning based on the perceived environmental map and issue the necessary high-level control commands to the drive-by-wire system. Tata Elxsi has licensed this software to one of the top OEMs in Germany to test autonomous driving features such as Stop and Go, Distance Keep, Lane Keep and Lane Change etc. on their driverless test vehicle. Autonomai software stack is modular in its architecture and easily customizable for the AD & L3-L5 ADAS features development.

V2X Emulator – V2X – Vehicle to everything (X) refers to an intelligent vehicular communication system, where all the vehicles and infrastructures are interconnected with each other. V2X incorporates more specific types of communication, such as Vehicle to Vehicle (V2V), Vehicle to Infrastructure (V2I), Vehicle to Pedestrian (V2P) and Vehicle to Network (V2N) communications as seen in Figure 2. By complementing other sensors, this technology provides a higher level of predictability and determinism by conveying location, speed, direction.

V2X can be essential for autonomous driving with the following features:
Accurate vehicle information: V2X can provide accurate speed, heading, and more while other sensors give estimated vehicle data.
Obstruction sensing: V2X communication alerts the autonomai about the non-line-of-sight objects and facilitates better decisions by the ego vehicles.
Works in all environmental conditions: V2X is a highly reliable sensor in any weather or lighting conditions.
Usually, V2X uses Dedicated Short Range Communication (DSRC) which is wireless communication technology. It uses a radio frequency spectrum band of 5.9 GHz. DSRC has low latency and is useful over short to medium distances with high reliability. V2X communication uses the DSRC technology and communicates using transponders known as On-Board Units (OBUs) used in V2V communication and Road Side Units (RSUs) used in V2I communication. The DSRC includes five main messages viz. Basic Safety Message (BSM), Road Side Alert message (RSA), Map Data, Traveler Information Message (TIM), and Signal Phase and Timing message (SPAT).
Tata Elxsi’s patented V2X Emulator is an equipment based platform which reproduces real world conditions in the lab and facilitates testing of V2X ECUs employed in AVs. With the help of augmented reality, field testing can be carried out of real roads by creating a virtual V2X environment. Tata Elxsi’s AR-V2X has been awarded AutoSens 2019 silver award for best validation tool.
Problem Statement:
Autonomous vehicles (AVs) majorly depend on their on-board sensors such as cameras, LIDARs, and RADARs to perceive on-road objects. These perception sensors have limited range and field of visibility, which constraints the AVs’ maneuvering ability & decision making capabilities to cover the entire L4/L5 driving scenarios.


Autonomy
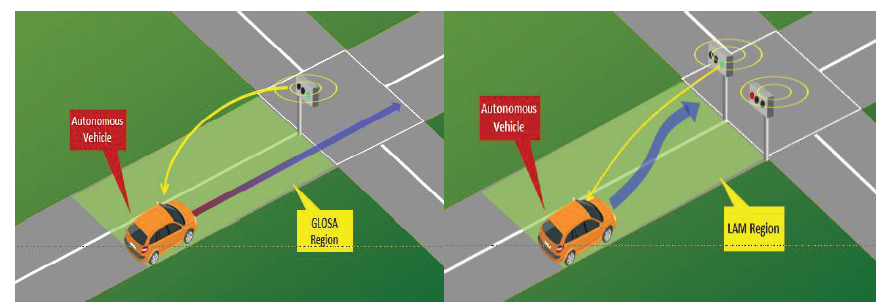
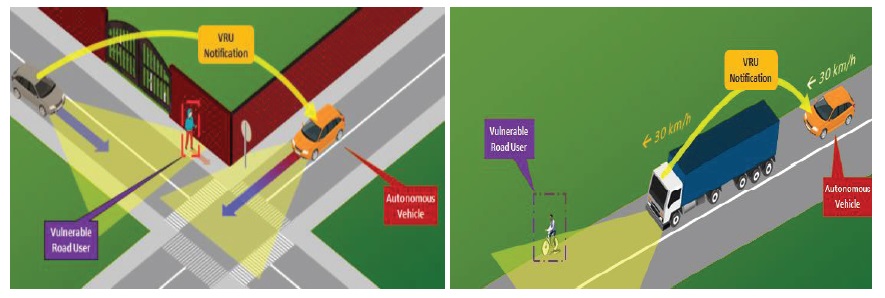
On-road scenarios such as complex intersections, handling Vulnerable Road Users (VRUs) are typical examples as shown in above figure, where the on-road objects/obstacles are obstructed/ not in the purview of the AVs’ on-board sensors. In such complex situations, AVs are expected to take safe & feasible maneuvering decisions. Wrong maneuvering decisions may lead to accidents causing injuries, fatalities and this may further bring down the already low trust factors on AVs among masses. Hence, relying totally on the on-board sensors under complex driving scenarios, harsh weather conditions make the AV’s L4-L5 mobility worse more.
Approach/Solution Alternatives:
Vehicle to Everything (V2X) Communication facilitates vehicles to communicate with other vehicles and the Road Side Units (RSUs)/infrastructures. It can alert the Autonomous Vehicles (AVs) about traffic jams ahead, bad weather, road works, and broken vehicles. Using this data, AVs can make better maneuvering decisions for safe and efficient journeys. Significant efforts are put in place by OEMs and Tier-1s to establish the vehicle connectivity in multiple ways such as,
- Use the network of vehicles to inform each other of situations ahead about the traffic jams, road hazards
- Usage of infrastructures equipped with intelligent sensors to predict the vehicles, VRUs behavior in blind zones for AVs and communicate to avoid the possible collisions
- Usage of smartphones & network providers for updated traffic flows
The challenge, however, will be to ensure the connectivity and compatibility of these systems working in multiple platforms and their seamless integration. Rigorous testing would help us to provide the efficacy of connected autonomous vehicles and their corresponding V2X feature handling capabilities.
V2X technology allows autonomous vehicles to communicate with other vehicles, infrastructure, and VRUs. This helps in making autonomous vehicles drive safer and make efficient driving maneuvers such as lane change, intersection handling etc. By providing the information about the Non-Line of Sight Objects through V2X, the Connected Autonomous Vehicles (CAVs) can take feasible maneuver decisions towards road hazards, VRUs, and thus helping avoid traffic injuries and fatalities.
In all the above scenarios the infrastructures and/or vehicles need to have the implementation of V2X solutions, which involve expensive infrastructure refinements, additional sensors, necessary hardware, and ensures secured communications of the information among infrastructure to vehicle and vice versa.
One efficient and cost-effective way is to use Tata Elxsi’s V2X Emulator which can be the most optimum choice of OEMs and Tier-1s to perform testing on simulator than on a real vehicle. V2X emulator is a test bed solution to test the V2X capability of a device under test. The device under test here is the ego vehicle. The V2X GUI software operates in a Windows environment. According to the scenario configured in the GUI, the V2X emulator software sends the DSRC messages. These DSRC messages are encapsulated for secure communication, as shown in Figure-2. Once the autonomai platform receives these messages, the data collected is decoded into the format as required by the autonomai modules such as Sensor Fusion, Decision making, and Motion planning for cooperative sensing and maneuvering, as shown in Figure-3.
For the establishment of the connection between windows OS and Linux environment, a socket communication approach is used where the encoded DSRC messages are sent through the sockets. Once the sockets are received by the Tata Elxis’s autonomous driving software (autonomai), a wrapper code developed transforms the DSRC messages in the format as required by the autonomai and is sent to the corresponding modules.

Figure 4 Connected Autonomai- Cooperative Sensing and Maneuvering
Case Studies:
To showcase the connected Autonomai with the V2X features, the following two scenarios are considered for Autonomous Vehicles applications:
• Yielding to Emergency Vehicles
• Speed Adaptation in Speed Limit Zones
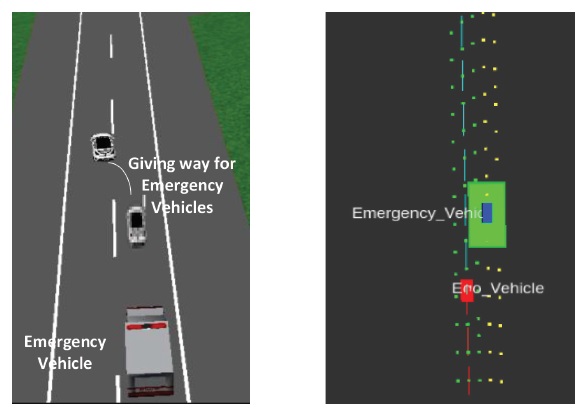
Yielding to Emergency Vehicles: The scenario considered here involves an emergency vehicle, which follows the ego vehicle by traversing the lane as same as the ego vehicle. The vehicle information of the emergency vehicle is sent through a specific DSRC message viz. Basic Safety Message (BSM). BSM mainly carries the positional information of the emergency vehicle viz. latitude and longitude, vehicle dimensions, vehicle speed, acceleration, and heading. It also carries a special flag, which indicates whether it is an emergency vehicle or not. On receiving this information, the autonomai checks if the emergency vehicle is within the defined range, and then the ego vehicle is configured to react by triggering a lane change/giving way by the ego vehicle, as seen in Figure 5. The emergency vehicle traveling ahead of the ego vehicle can also be seen.
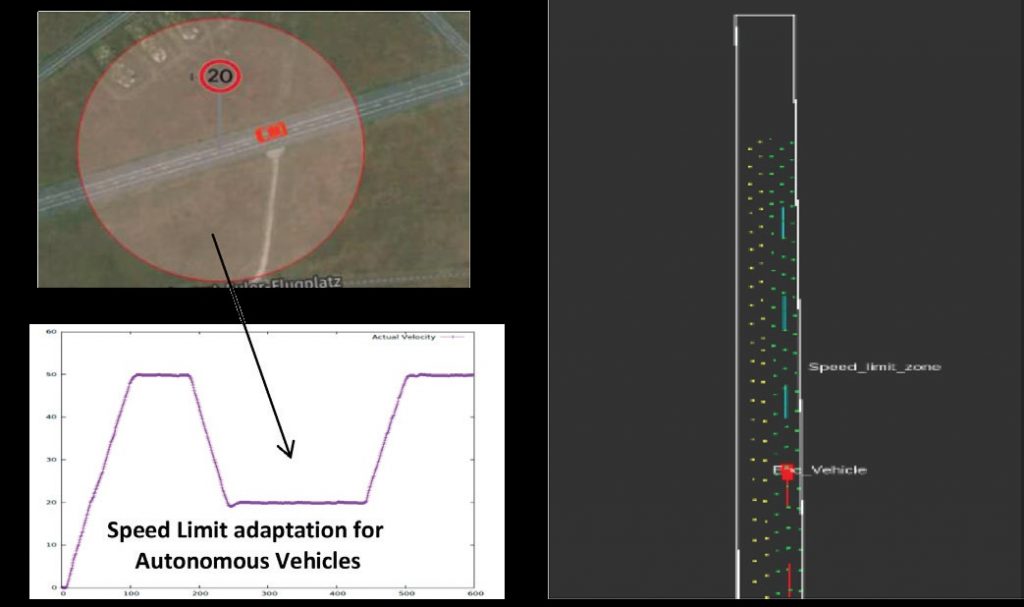
Speed Limit Adaptation in Speed Limit Zones: This scenario involves a Road Side Unit (RSU), which gives a speed limit value which has to be maintained over the defined region. The information corresponding to the Road Side Unit is sent through a specific DSRC message called Road Side Alert (RSA) message. RSA message mainly carries the positional information of the Road Side Unit viz. latitude and longitude and speed limit. On receiving this information, the ego vehicle makes the corresponding changes and hence ramps speed to the specified limit, as seen in Figure 6. The variation in the speed of the ego vehicle can be seen in the figure. The figure also shows that the ego vehicle speed, which was initially 50kmph ramps down to 20kmph as specified by the RSU. It can be observed that the ego vehicle’s speed ramps up to the desired/set speed value, once it gets out of the speed limit zone. RVIZ plot of speed limit zone and the ego vehicle traversing is also shown in the Figure 5.
The two case studies mentioned above provides a brief on how the Connected Autonomous Vehicle systems could be enabled, tested and their features are benchmarked in a virtual environment using V2X Emulator. AVs coupled with the V2X is one such a possibility that bring more enabled L4/L5 mobility features.
Conclusion:
For a driver to give up on the responsibility of driving the vehicle, it is recommended to enable Autonomous vehicles with Connectivity. This also brings about a distribution of responsibilities for Sensing and maneuvering on the entire ecosystem, rather than being over an Autonomous vehicle alone. And, with Continuous development and improvements in vehicle-infrastructure connectivity (ex. DSRC, 5G etc.) with improving AVs processing power will significantly promotes L4-L5 level of mobility. Lastly, the road to implementation can start off with V2X Emulator approach for significant cost and time saving.
References:
- Surface Vehicle Standard (J2735) for Dedicated Short Range Communications (DSRC) Message Set Dictionary, 2016, SAE International.
- Adaptive green wave with speed advice for automated vehicles, 13th ITS European Congress, Brainport, the Netherlands, 2019, X. Zhang, R. Blokpoel, and M. Lu.
- Managing Automated Vehicles Enhances Network (MAVEN) Article, 2019, A. Giorgiutti, J. Vreeswijk, O. Pribyl, and K. Rozema.
Author:
Dr. Gopinath Selvaraj received BE-(EEE) (2000) from Madurai Kamaraj University, M.Tech (2002) and Ph.D. (2007) in Control Engineering and Automation from IIT Delhi. His research interests include ADAS & AD, robotics, machine learning, automotive controls, signal processing. He has published more than 25 papers in international journals/conferences. He is an inventor with four patents and a senior member of IEEE, IEEE-Control System Society (CWC-Bangalore chapter).
Published in Telematics Wire


